
Framework
Compared to natural RGB images, data captured by 3D / depth sensors (e.g., Microsoft Kinect) have different properties, e.g., less discriminable in appearance due to lacking color / texture information. Applying convolutional neural networks (CNNs) on these depth data would lead to unsatisfying learning efficiency, i.e., requiring large amounts of annotated training data for convergence. To address this issue, our work proposes a novel memory network module, called Convolutional Memory Block (CMB), which empowers CNNs with the memory mechanism on handling depth data. Different from the existing memory networks that store long / short term dependency from sequential data, our proposed CMB focuses on modeling the representative dependency (correlation) among non-sequential samples. Specifically, our CMB consists of one internal memory (i.e., a set of feature maps) and three specific controllers, which enable a powerful yet efficient memory manipulation mechanism. In this way, the internal memory, being implicitly aggregated from all previous inputted samples, can learn to store and utilize representative features among the samples. Furthermore, we employ our CMB to develop a concise framework for predicting articulated pose from still depth images. Comprehensive evaluations on three public benchmarks demonstrate significant superiority (about 6%) of our framework over all the compared methods. More importantly, thanks to the enhanced learning efficiency, our framework can still achieve satisfying results using 50% less training data.
Figure 1. Detailed architecture of our proposed Convolutional Memory Block (CMB). The CMB consists of one internal memory (i.e., a set of feature maps) and three specific convolutional controllers, which can manipulate the internal memory and extract implicit structural representation from the input feature map. Specifically, the old internal memory from the previous training iteration is loaded by the input and memory controller. Then, the memory controller fuses its memory representation and the response of the input controller and saves the fused representation to be the new internal memory. After that, the output controller loads the new internal memory to generate memory representation, which is further concatenated with the input feature map to be the final output.
We propose a novel memory network module, called Convolutional Memory Block (CMB), inspired by the recent work of Neural Turing Machine~\cite{ntm14}. Considering the special properties of depth data, e.g., low discriminability in appearance due to lacking color / texture information, we leverage the memory mechanism to enhance the pattern abstracting of CNNs by reusing their rich implicit convolutional structures and spatial correlations among the training samples. Specifically, the proposed CMB consists of three specific convolutional controllers and one internal memory (i.e., a set of feature maps) as shown in Figure 1. The convolutional controller is designed to process the input feature map from the previous layer and manipulate the internal memory. Different from ConvLSTM and ConvGRU that require time-series data, the proposed convolutional controller performs convolution in a hierarchical organization via several convolutional layers with batch normalization. This ensures that our proposed CMB is capable of extracting more abstract information from non-sequential training samples to augment image-dependent feature representation. Specifically, our CMB intends to capture and store the representative dependencies or correlations among training samples according to specific learning tasks, and further employ these stored dependencies to enhance the representation of convolutional layers. In this way, our CMB encourages the CNN architecture to be lightweight and require less training data. To clarify the effectiveness of the proposed CMB, we have developed a concise yet powerful framework for articulated pose estimation by embedding the CMB into an hourglass-shape network (see Figure 2), which is inspired by designing principles of the hourglass network architecture.
 Figure 2. An overview of the proposed convolutional memory block embedded framework for estimating articulated poses.
Figure 2. An overview of the proposed convolutional memory block embedded framework for estimating articulated poses.
As illustrated in Figure 3, our proposed Convolutional Memory Block (CMB) consists of one internal memory (a set of feature maps) and three convolutional controllers for facilitating the internal memory manipulation. The internal memory is designed to store the learned implicit image-dependent structural features. Different from the widely used neural controllers which use full connections to perform input-to-state and state-to-state transitions, our proposed convolutional controller leverages the convolution operator to process the input feature map from the previous neural layer, and further manipulates the internal memory in both the training and testing phase. Figure 1 also illustrates three specific convolutional controllers in our proposed CMB, i.e., input controller, memory controller and output controller. Inspired by the design principles from~\cite{googlenet15cvpr}, our proposed convolutional controllers share the same elaborately crafted structure, which leverages a hierarchical organization of convolutional layers rather than a simple convolutional layer as ConvLSTM and ConvGRU. This ensures that the convolutional controller is able to extract rich and high-level implicit structural features. Note that, to simplify the further calculation, the output response of each convolutional kernels all share the same size with the input feature map. For each specific convolution controller, the intermediate feature map is further processed individually. In the following, we will introduce these three specific convolutional controllers in the training and testing phase formally.
Figure 3. Detailed illustration of our convolutional controller.
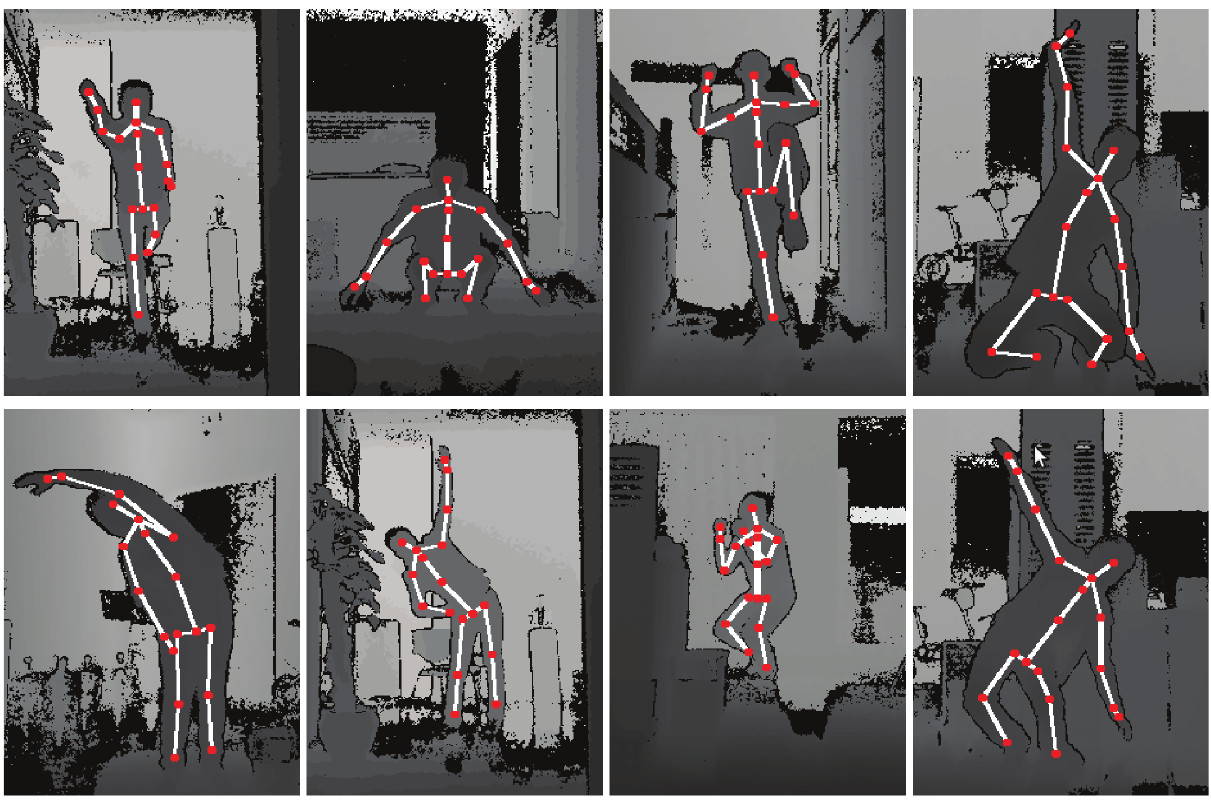
Kinect2 Human Pose Dataset (K2HPD)
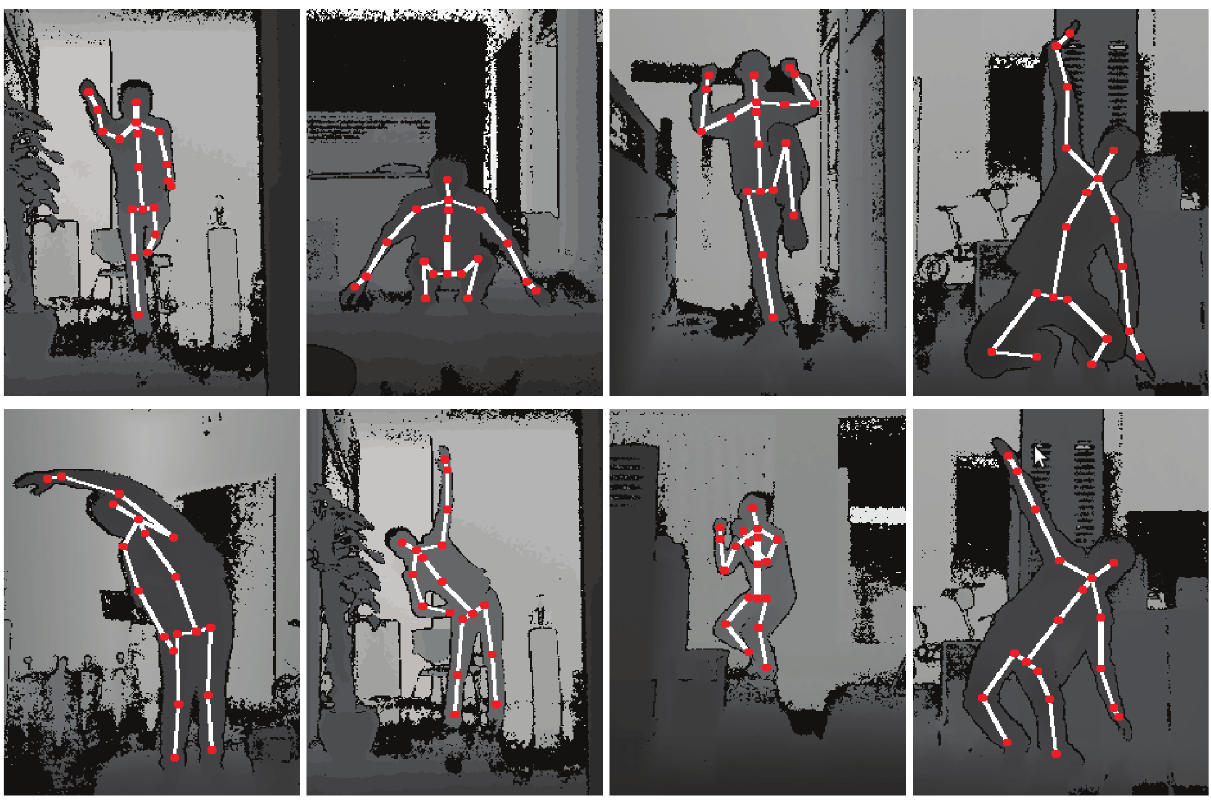
Kinect2 Human Pose Dataset (K2HPD) includes about 100K depth images with various human poses under challenging scenarios. As shown, this dataset consists of 15 body joints of 30 subjects under ten different challenging scenes. The subject is asked to perform both normal daily poses and unusal poses. The human body joints are defined as follows: \emph{Head, Neck, MiddleSpine, RightShoulder, RightElbow, RightHand, LeftShoulder, LeftElbow, LeftHand, RightHip, RightKnee, RightFoot, LeftHip, LeftKnee, LeftFoot.}. The ground truth body joints are firstly estimated via the Kinect SDK, and further refined by active users.
- hcp@sysu.edu.cn
- 广州市广州大学城外环东路132号

- Projects
- Computer Vision
- Multimodal
- Robotics
- Links
- Git-Lab