
CVPR 2024
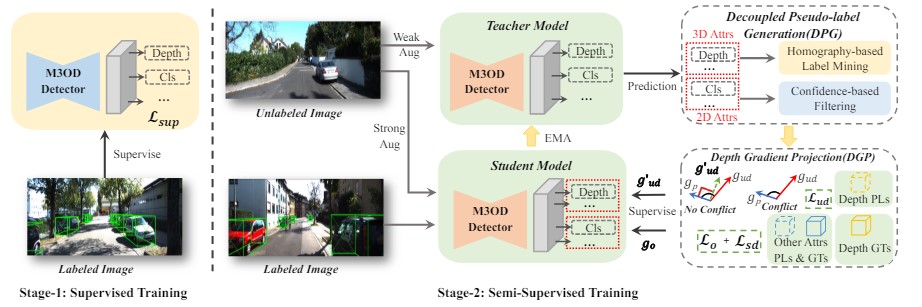
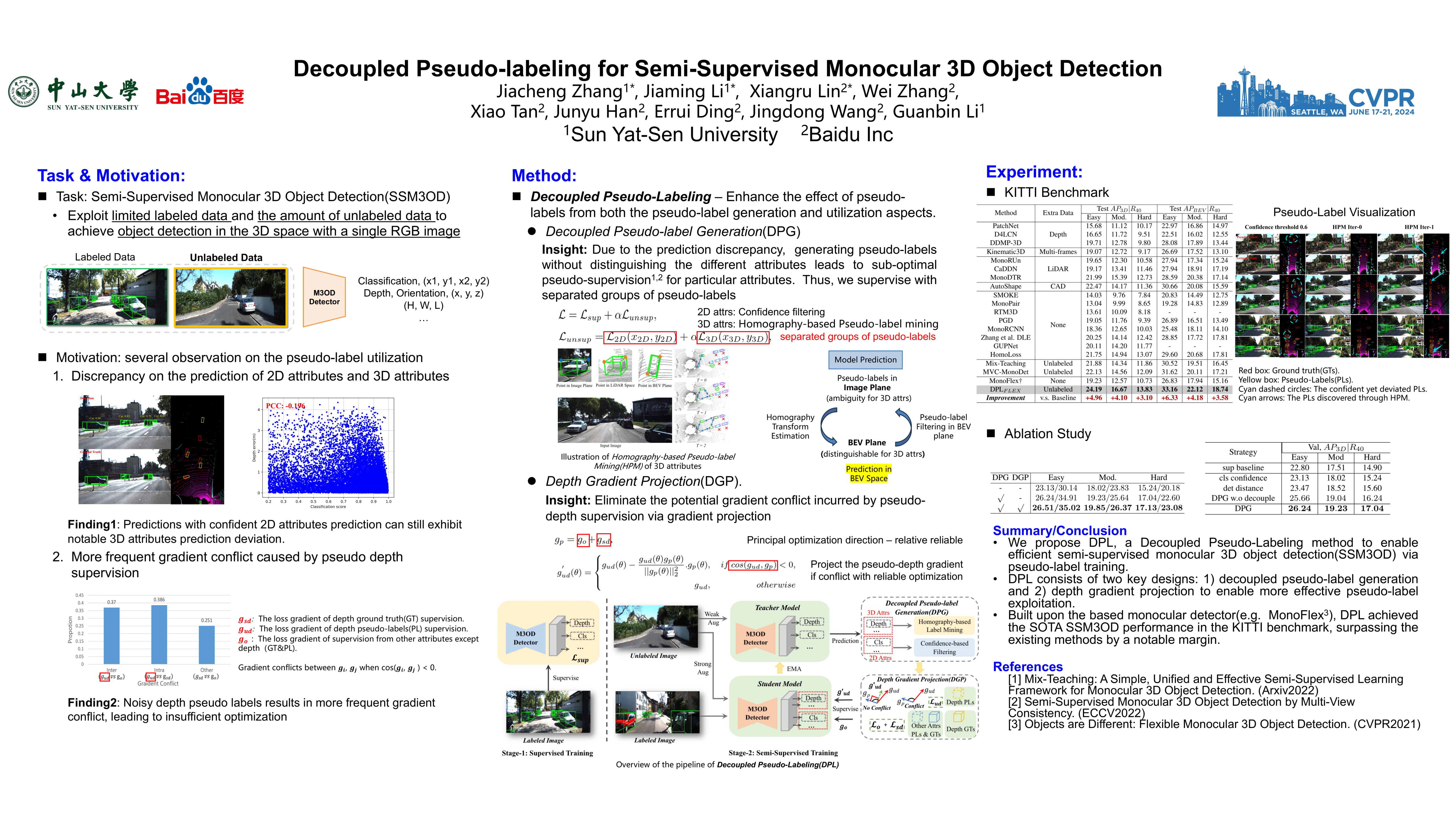
Decoupled Pseudo-labeling for Semi-Supervised Monocular 3D Object Detection
中山大学人机物智能融合实验室
Human Cyber Physical Intelligence Integration Lab
- hcp@sysu.edu.cn
- 广州市广州大学城外环东路132号
Official Account

- Projects
- Computer Vision
- Multimodal
- Robotics
- Links
- Git-Lab
©2026 HCP in SYSU 粤ICP备2021037607号
©2026 HCP in SYSU
粤ICP备2021037607号