
Abstract
Embodied Artificial Intelligence (Embodied AI) is crucial for achieving Artificial General Intelligence (AGI) and serves as a foundation for various applications that bridge cyberspace and the physical world. Recently, the emergence of Multi-modal Large Models (MLMs) and World Models (WMs) have attracted significant attention due to their remarkable perception, interaction, and reasoning capabilities, making them a promising architecture for the brain of embodied agents. However, there is no comprehensive survey for Embodied AI in the era of MLMs. In this survey, we give a comprehensive exploration of the latest advancements in Embodied AI. Our analysis firstly navigates through the forefront of representative works of embodied robots and simulators, to fully understand the research focuses and their limitations. Then, we analyze four main research targets: 1) embodied perception, 2) embodied interaction, 3) embodied agent, and 4) sim-to-real adaptation, covering the state-of-the-art methods, essential paradigms, and comprehensive datasets. Additionally, we explore the complexities of MLMs in virtual and real embodied agents, highlighting their significance in facilitating interactions in dynamic digital and physical environments. Finally, we summarize the challenges and limitations of embodied AI and discuss their potential future directions. We hope this survey will serve as a foundational reference for the research community and inspire continued innovation. The associated project can be found at this https URL.
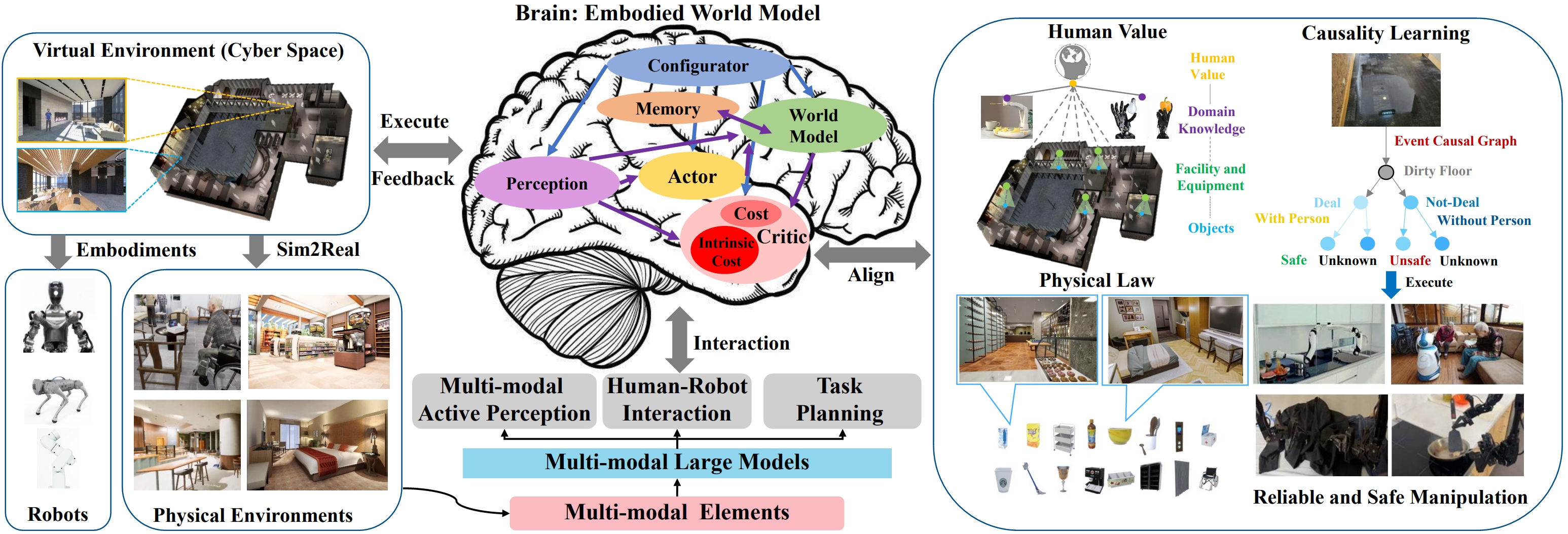
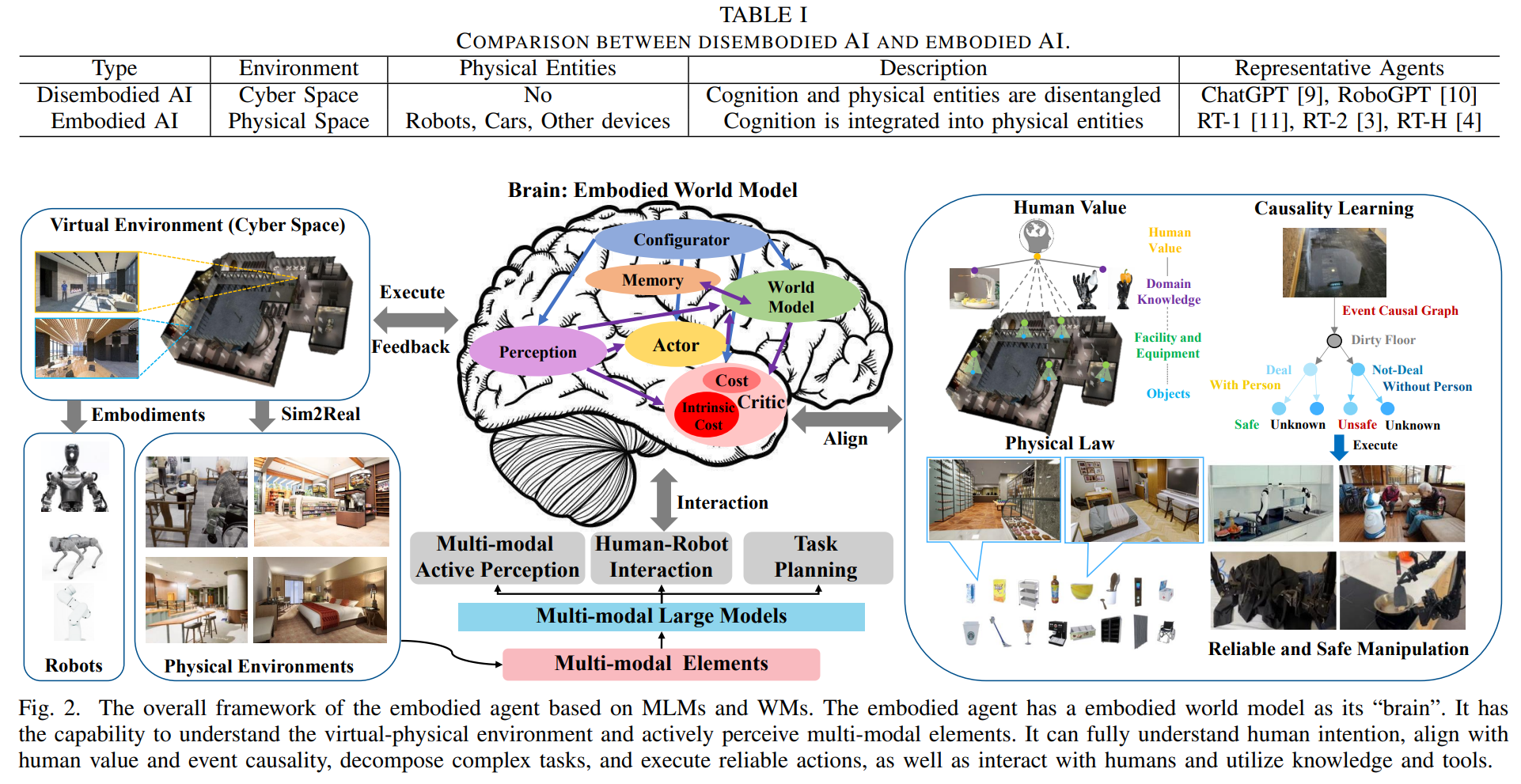
Framework

Conclusion
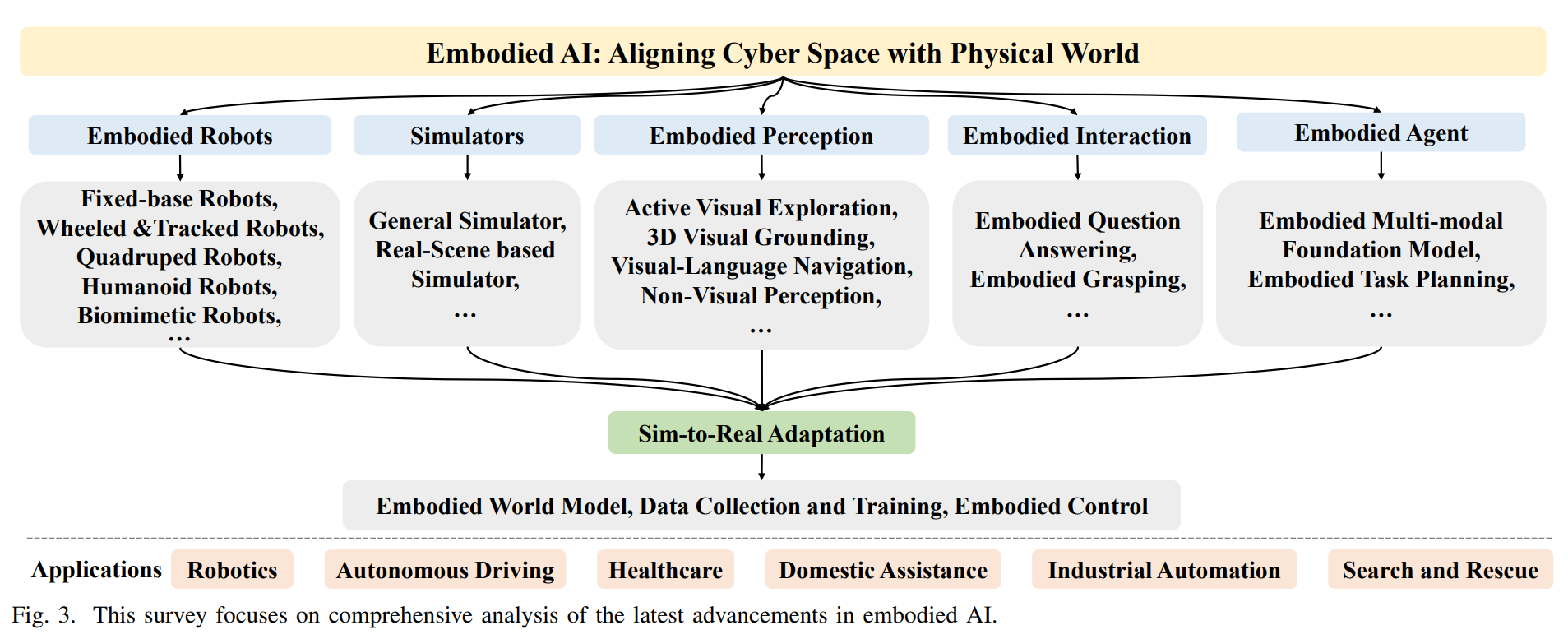
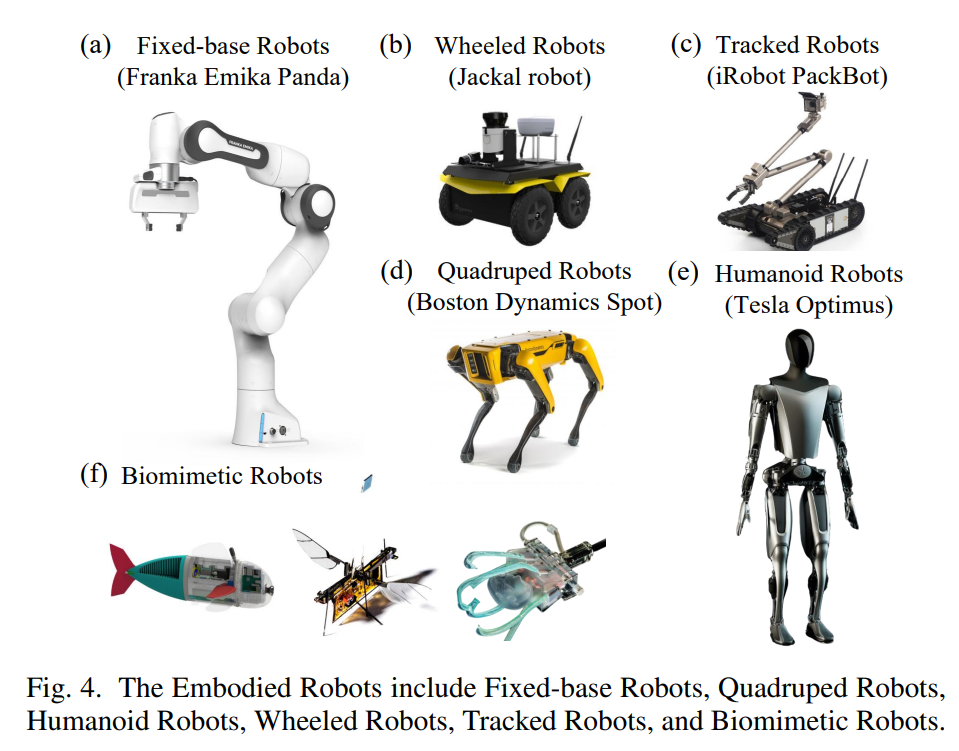
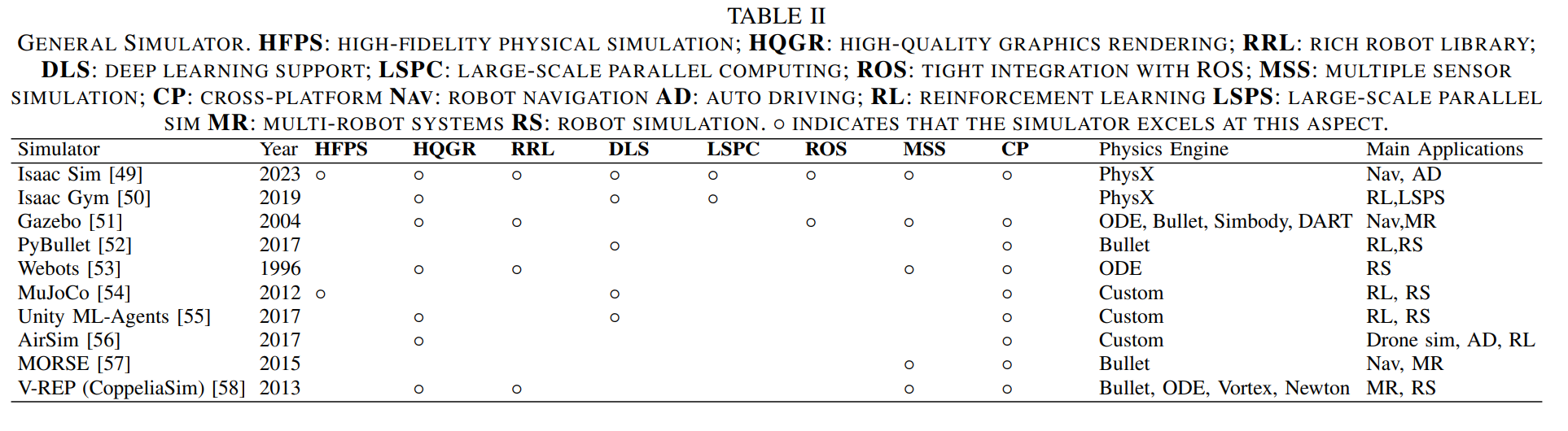
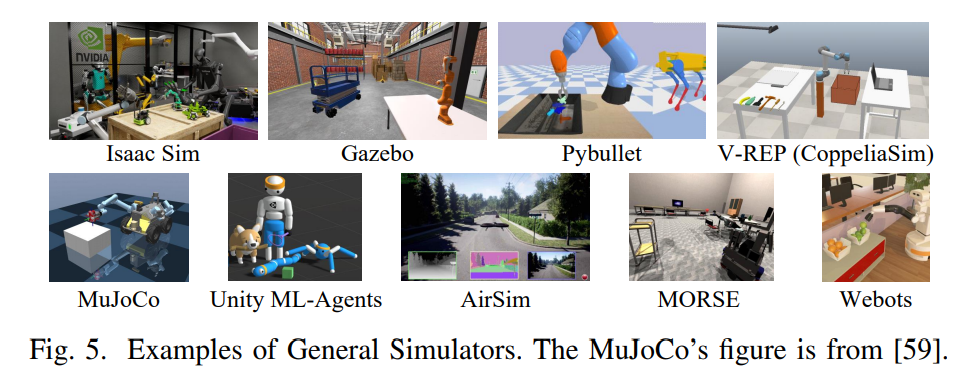
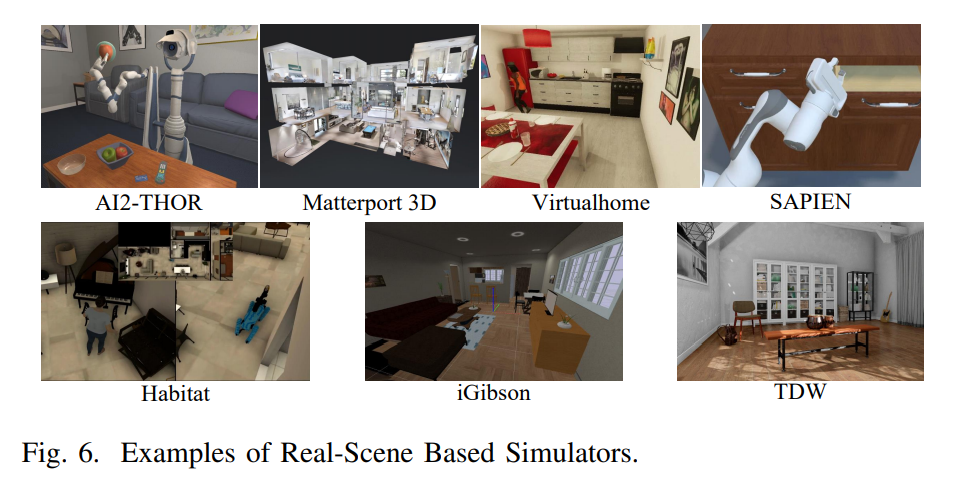
Embodied AI allows agents to sense, perceive, and interact with various objects from both cyber space and physical world, which exhibits its vital significance toward achieving AGI. This survey extensively reviews embodied robots, simulators, four representative embodied tasks: visual active perception, embodied interaction, embodied agents and simto-real robotic control, and future research directions. The comparative summary of the embodied robots, simulators, datasets, and approaches provides a clear picture of the recent development in embodied AI, which greatly benefits the future research along this emerging and promising research direction.
Acknowledgement
We sincerely thank Jingzhou Luo, Xinshuai Song, Kaixuan Jiang, Zhida Li, and Ganlong Zhao for their contributions.
- hcp@sysu.edu.cn
- 广州市广州大学城外环东路132号

- Projects
- Computer Vision
- Multimodal
- Robotics
- Links
- Git-Lab